Robotizuota poliravimo mašina – didelio tikslumo automatizuotas paviršiaus apdirbimas





Detali schema
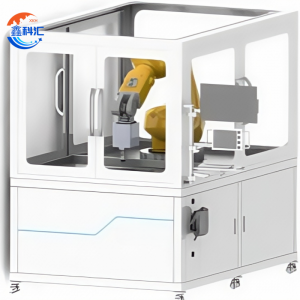

Robotinės poliravimo mašinos apžvalga
Robotizuota poliravimo mašina yra pažangi, visiškai automatizuota paviršiaus apdirbimo sistema, sukurta siekiant atitikti aukščiausius tiksliosios gamybos reikalavimus. Ji apjungia šešių ašių robotinį valdymą, grįžtamojo ryšio poliravimo technologiją ir dviejų galvučių konfigūraciją, kad galėtų apdoroti įvairias medžiagas ir sudėtingas geometrijas išskirtiniu tikslumu ir nuoseklumu.
Nesvarbu, ar tai optiniai lęšiai, aviacijos ir kosmoso dalys, tiksliosios inžinerijos komponentai ar puslaidininkių pritaikymas, ši mašina užtikrina stabilią, pakartojamą ir aukštos kokybės paviršiaus apdailą – net ir esant nanometrų lygio tolerancijoms.


Išsamus robotinio poliravimo staklių suderinamumas su ruošiniais
Sistema palaiko šių duomenų apdorojimą:
-
Plokšti paviršiaistiklo, keramikos ir metalo plokštėms
-
Cilindrinės ir kūginės formospavyzdžiui, ritinėliai, velenai ir vamzdžiai
-
Sferiniai ir asferiniai komponentaioptinėms sistemoms
-
Laisvos formos ir neašiniai paviršiaisu sudėtingomis kreivėmis ir perėjimais
Dėl savo universalumo jis tinkatiek masinė gamyba, tiek didelio tikslumo individuali gamyba.
Pagrindinės robotinio poliravimo aparato savybės ir privalumai
1. Dvigubo poliravimo galvutės technologija
-
Įrengtasvieno sukimosiirsavaiminis sukimasispoliravimo galvutės, kad būtų lankstesnės.
-
Greito įrankių keitimo galimybė palaiko kelis apdorojimo režimus be ilgų prastovų.
-
Idealiai tinka grubaus ir smulkaus poliravimo etapų perjungimui.
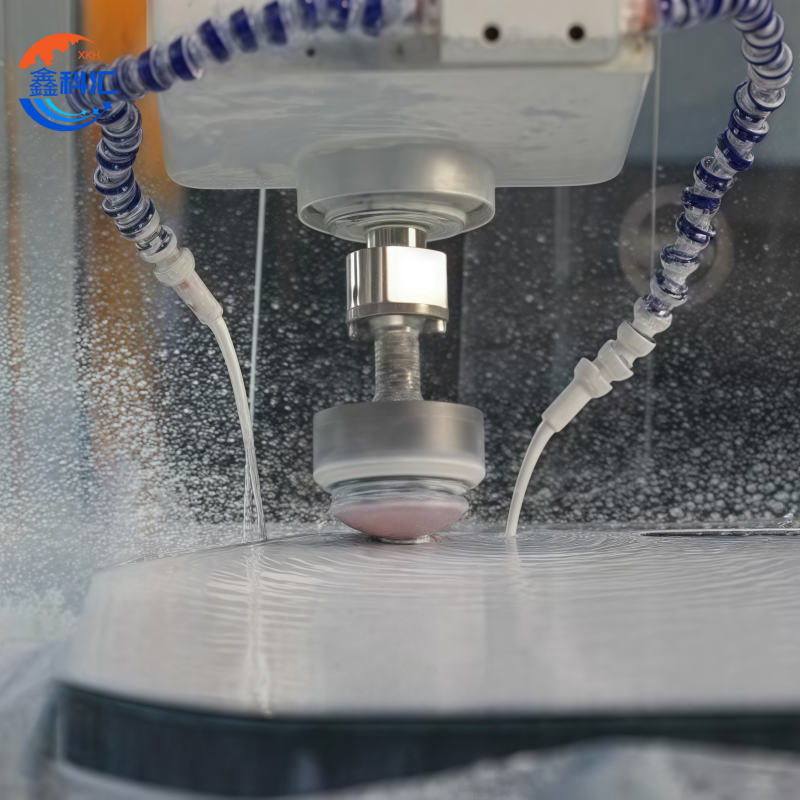
2. Tikslioji jėgos valdymo sistema
-
Stebėjimas realiuoju laikuslėgis, temperatūra ir poliravimo skysčio srautas.
-
Nuoseklus jėgos taikymas užtikrina vienodą paviršiaus apdailą visame ruošinyje.
-
Geba automatiškai prisitaikyti prie paviršiaus nelygumų.
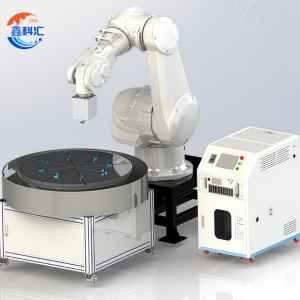
3. Šešių ašių robotų valdymas
-
Visiška judėjimo laisvė dirbant su sudėtingomis geometrijomis.
-
Sklandūs, tikslūs judėjimo keliai, apskaičiuoti naudojant pažangius algoritmus.
-
Didelis pakartotinio padėties nustatymo tikslumas nuo ±0,04 mm iki ±0,1 mm, priklausomai nuo modelio.
4. Išmanioji automatizacija ir matavimas
-
Automatinio kalibravimo įrankiai tiksliam nustatymui ir lygiavimui.
-
Koordinačių matavimo sistema tiksliam padėties nustatymui.
-
Pasirinktinaiinternetinis storio stebėjimaskokybės kontrolei realiuoju laiku.
5. Pramoninės klasės konstrukcijos kokybė
-
Dvigubo servo variklio konstrukcija padidina poliravimo efektyvumą ir stabilumą.
-
Tvirta mechaninė konstrukcija sumažina vibraciją ir užtikrina ilgalaikį tarnavimo laiką.

Robotinės poliravimo mašinos techninės specifikacijos
| Įrangos modelis | Roboto kūnas | Pakartotinio padėties nustatymo tikslumas | Apdorojimo skersmens diapazonas | Vieno sukimosi poliravimo galvutė | Daugiasukė poliravimo galvutė | Mažas įrankis | Pagrindinio rato tipo poliravimas | Sferinis galvos poliravimas | Greito pakeitimo pabaiga | Automatinio kalibravimo įrankis | Koordinačių matavimo galvutė | Internetinis storio stebėjimas | Skaitmeninio valdymo platforma |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / visas diapazonas | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / visas diapazonas | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / visas diapazonas | Φ80 ~ Φ800 mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / visas diapazonas | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / visas diapazonas | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / visas diapazonas | Φ200 ~ Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / visas diapazonas | Φ200 ~ Φ2000 mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
DUK – Robotizuotas poliravimo aparatas
1. Kokio tipo ruošinius gali apdoroti robotinis poliravimo aparatas?
Mūsų robotinė poliravimo mašina palaiko įvairių formų ir paviršių, įskaitant plokščius, lenktus, sferinius, laisvos formos ir sudėtingus kontūrus, poliravimą. Ji tinka optiniams komponentams, tikslioms formoms, metaliniams paviršiams ir kitoms didelio tikslumo poliravimo reikmėms.
2. Kuo skiriasi vienos ir kelių rotacijų poliravimo galvutės?
-
Vieno sukimosi poliravimo galvutėĮrankis sukasi aplink vieną ašį, idealiai tinka standartiniam paviršiaus apdirbimui ir greitam medžiagos šalinimui.
-
Daugiasukė poliravimo galvutėĮrankis sujungia sukimąsi su savaiminiu sukimu (orbitiniu), todėl galima tolygiau poliruoti išlenktus ir nelygius paviršius.
3. Koks yra didžiausias apdirbimo skersmuo?
Priklausomai nuo modelio:
-
Kompaktiški modeliai (pvz., IRP500S) turi rankenąΦ50–Φ500 mm.
-
Didelio masto modeliai (pvz., IRP2000AD) gali apdoroti ikiΦ2000 mm.
Apie mus
„XKH“ specializuojasi aukštųjų technologijų kūrime, gamyboje ir pardavime, susijusiame su specialiu optiniu stiklu ir naujomis kristalinėmis medžiagomis. Mūsų produktai skirti optinei elektronikai, plataus vartojimo elektronikai ir kariuomenei. Siūlome safyro optinius komponentus, mobiliųjų telefonų lęšių dangtelius, keramiką, lengvą stiklo pluoštą, silicio karbido SIC, kvarco ir puslaidininkinių kristalų plokšteles. Turėdami kvalifikuotų specialistų patirtį ir pažangiausią įrangą, mes puikiai atliekame nestandartinių gaminių apdorojimą ir siekiame tapti pirmaujančia optoelektroninių medžiagų aukštųjų technologijų įmone.

Susiję produktai
-

4H pusiau HPSI 2 colių SiC substrato plokštelė Gaminiai...
-
Individualizuotos kvadratinės dėžės transportavimo dėžės kvadratinis langas p ...
-

6 colių HPSI SiC substrato plokštelė su silicio karbidu...
-

Safyro korundas brangakmenio Al2O3 krištolo...
-

Aliuminio metalo monokristalo substrato poliravimo...
-

Au dengta plokštelė, safyro plokštelė, silicio plokštelė...